





Remotely Operated Vehicle, which short as ROVs, are deployed to the water via an umbilical cable for filming or operational tasks, with video or other information collected through control units or control rooms located onshore or onboard vessels. These systems typically consist of an underwater vehicle, a shore-based control platform, and an umbilical cable (neutral buoyancy cable or armored cable) for data transmission.
The system configuration of small underwater robots is generally simpler and more lightweight, typically comprising only the underwater vehicle, a neutral buoyancy umbilical cable, and a shore-based control box. The frames of these underwater vehicles are made of high-strength PP materials, significantly reducing the overall weight. These robots are equipped with electric underwater thrusters, cameras, lights, and built-in sensors for depth, temperature, and direction.
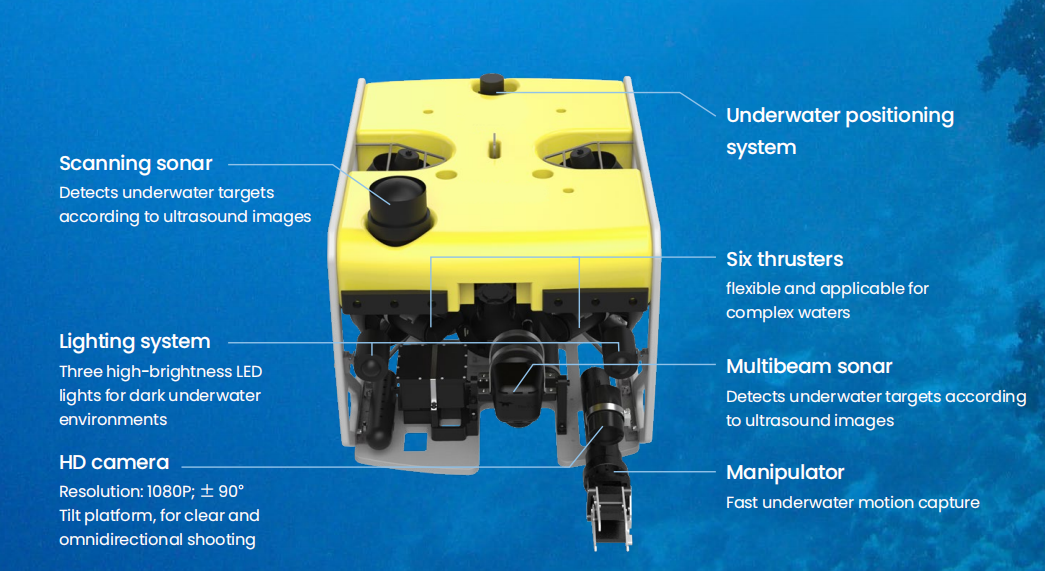
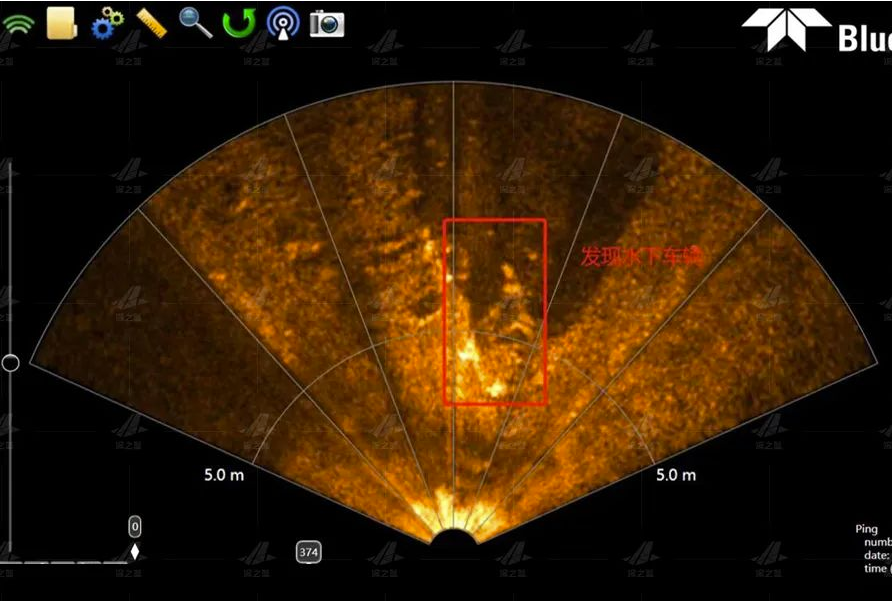
Small underwater vehicles often integrate a compact two-dimensional imaging sonar system. The sonar processes sound echoes to generate corresponding sonar images, enabling the robot to identify and display underwater targets even in poor water quality or at long distances, such as in inland lakes.

A Set of ROV

Underwater Manipulator
Large or work-class underwater robots often include a dedicated Launch and Recovery System (LARS) and a Tether Management System (TMS) to mitigate the effects of vessel heave on the vehicle.
Currently, underwater vehicles are typically built with a frame structure made of high-strength steel or engineering plastics. They are equipped with multiple high-thrust underwater thrusters, enabling free movement at depths of up to 12,000 meters. In addition to integrated sensors, these vehicles are outfitted with underwater cameras, lights, high-thrust underwater thrusters, large multi-functional underwater hydraulic manipulators, and underwater acoustic positioning systems. These systems work in unison to perform underwater exploration or recovery missions. Large or work-class underwater robots capable of diving to depths of 3,000 meters or 6,000 meters are powered by hydraulic tools, feature oil-sealed internal systems, and weigh approximately 100 tons. Such systems require specialized support vessels for underwater operations.
 |
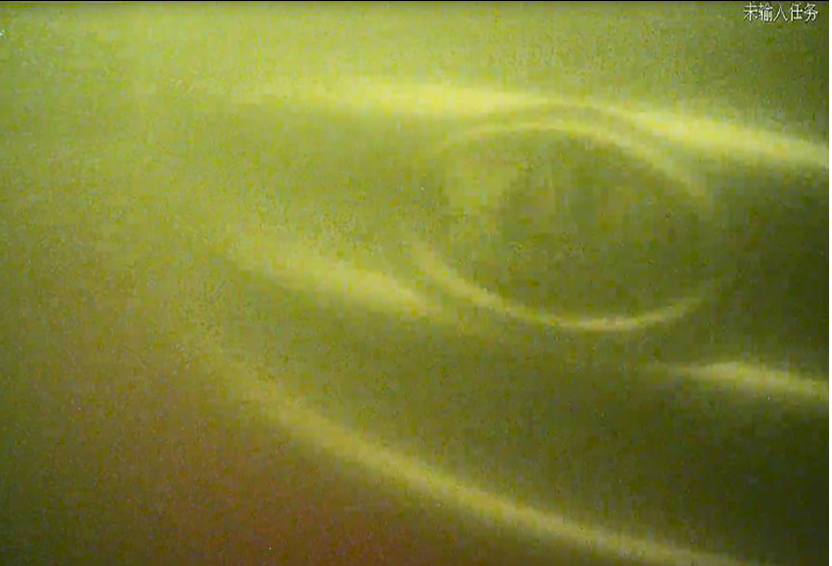 |
| Submerged vehicle is found via sonar scanning | Submerged Vehicle is Confirmed via Underwater Camera |
ROV Product in Testing
Our factory has a professional testing pool that supports full-range functional testing of ROV


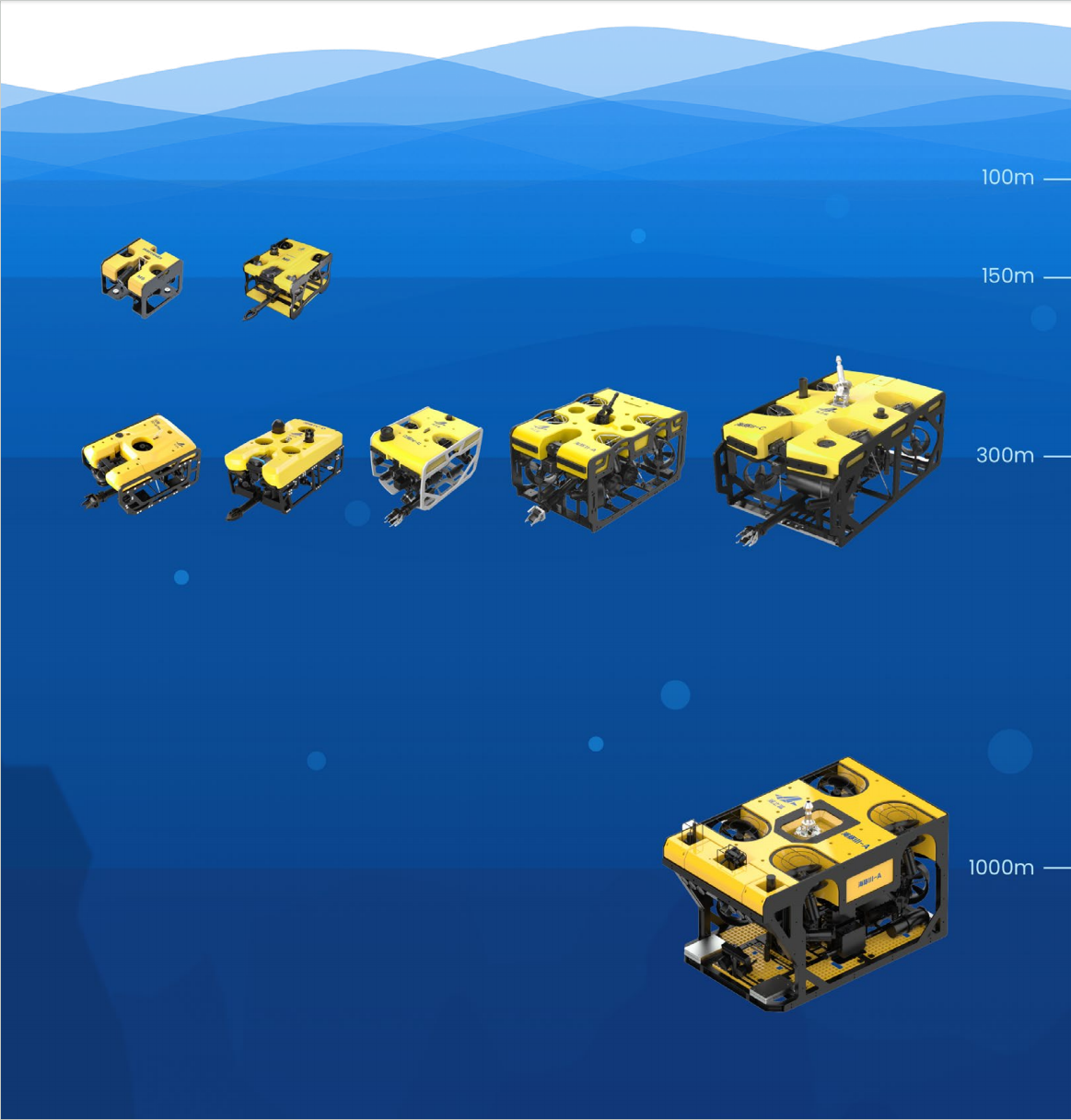
MoxLab provides ROVs with different parameters.
Weight range from 16kg~ 120kg
Working depth range from 150~1000m
| Item | M1 | MHV | MJV | MOV | MCV |
|---|---|---|---|---|---|
| Dimensions | 485mm*380mm*295mm | 755mm*514mm*422mm | 780mm*585mm*510mm | 1100mm*720mm*580mm | 1584mm*940mm*710mm |
| Depth | 150m | 300m | 300m | 300m | 1000m |
| Power | 2000w | 3000w | 6000w | 10kw | 20kw |
| Weight | ≈16kg | ≈35kg | ≈65kg | ≈120kg | ≈265kg |
| Number of Thrusters | 6 | 4 | 6 | 8 | 8 |
| Camera System | Resolution: 1080p Sensitivity: 0.001Lux Field of view: 110° | Resolution: 1080p Sensitivity: 0.001Lux | Resolution: 1080p Sensitivity: 0.001Lux Field of view: 110° Resolution: 1080p Sensitivity: 0.01Lux Field of View: 115°~33.8 | Resolution: 1080p Sensitivity: 0.001Lux Field of view: 110° | Resolution: 1080p Sensitivity: 0.001Lux Field of view: 110° |
| Illumination | 4000L | 12000L | 12000L | 16000L | 32000L |
| Maximum Cable Length | 200m | 300m | 400m | 400m | 1200m |
| Available Accessories | Single-function manipulator | Multi-Beam Imaging Sonar Mechanical Scanning Sonar Two-function manipulator | Dynamic Positioning System Multi-Beam Imaging Sonar Mechanical Scanning Sonar Non-destructive testing equipment Five-function master-slave manipulator, etc. | Dynamic Positioning System Real-time 3D Imaging Sonar Cable detector Five-function master-slave manipulator, etc |
|
| Automatic Function | Automatic orientation, automatic depth control, automatic altitude and distance with altimeter | Automatic orientation Automatic depth fixing Attitude holding | Auto-orientation, auto-height setting Automatic depth fix, attitude hold Optional underwater hovering, position holding path tracking | Auto-orientation, auto-height setting Automatic depth fix, attitude hold Optional underwater hovering, position holding path tracking |
